Förbättrad trafiksäkerhet genom samordnad användning av sensordata från fordon
Projektet kommer att studera hur sensorer på uppkopplade fordon kan bidra till en bättre bild av den aktuella trafiksituationen, för att ge bättre förutsättningar för en kvalitativ trafikstyrning.

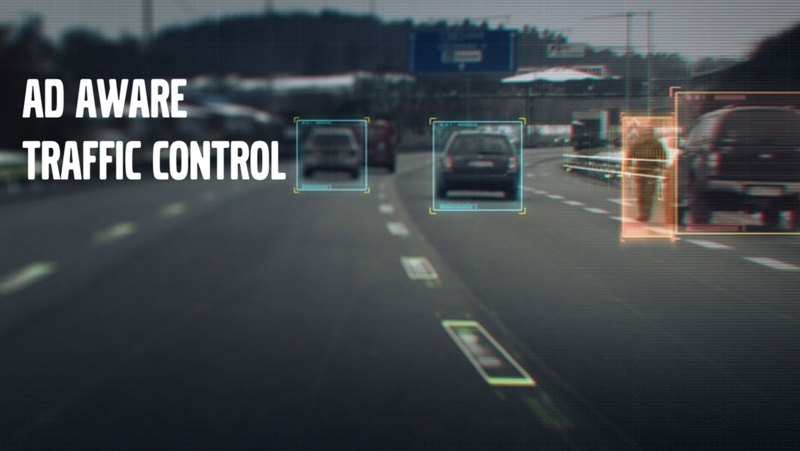
Projektet kommer att använda och utöka plattformen AD Aware Traffic Control för att koppla upp och interagera med fordons sensorplattformar och analysera hur detta tillsammans med annan trafik- och fordonsrelaterad data kan utnyttjas för att samordna och förbättra tjänster för trafiksäkerhet, samt utreda juridiska aspekter av sådana tjänster.
Systemet kommer att vara uppkopplat mot flera olika fordonsflottor med avancerade förarstödsfunktioner (ADAS) och varierande grad av självkörandefunktioner (AD). Fordon från Volvo Cars, CEVT samt Veoneer kommer att utnyttjas för praktiska tester under projektet. Arbetet kommer att bygga vidare på den molnbaserade plattform som tagits fram i projekten ”AD Aware Traffic Control” (2016-04302), ”AD Aware Traffic Control Emergency vehicles” (2017-01985) samt ”AD Aware Traffic Control Advanced Cooperative Driver Assistance” (2018-03991).
I arbetet används den teknik som finns i Drive Sweden Innovation Cloud och dess resultat kommer att integreras i denna innovationsplattform för framtida bruk.
Projektet har producerat en film som tydligt illustrerar hur systemet fungerar i praktiken, på vägarna. Se filmen här:
Projektperiod:
2020-01-07 - 2020-12-23
Kontakt:
Kristian Jaldemark, Carmenta
kristian.jaldemark@carmenta.com
Projektpartners:
Carmenta, Veoneer, CEVT, Volvo Cars and Ericsson
Vinnovanummer
2019-05088
Relaterade projekt

AI AWARE Scale Up
AI Aware

Samordnat och avancerat förarstöd till uppkopplade och självkörande AD- och ADAS-fordon

Trafikledning av utryckningsfordon